| Home > Robots > HAZARD > January | |
| January | |

|
I don't even know what this is! This sort of thing ain't my bag, baby! |
 |
Gel cell batteries are the Chevy cars of robot building: cheap and heavy. Tony took the harder road and started matching NiCad packs early in the game. This laborious task consists of high current discharge tests where the time is measured until a 0.9 volt/cell threshold is reached. The best resistive loads are arrays of automotive lamps. | |
 |
The main weapon drive motors are 90vdc units from a surplus buttocks exerciser. But operating components at their rated parameters is a glaring sign of inexperience in this sport, so we plan on laying at least 120v into these babies. And they're going to like it! | |
 |
I've heard that proper advance planning is the key to designing a good robot. But since I'd never tried it myself, Tony showed me the drill. (The sidewalk chalk was my idea, though I had to borrow it from the kids next door.) | 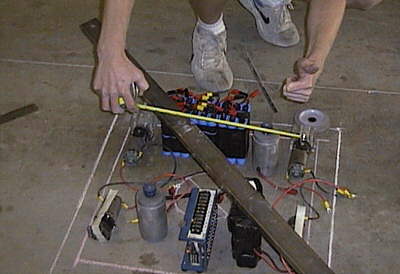 |
 |
The acutal weapon blade is self-dusting. | |
 |
We're reusing the Colson Caster wheels from the Agamemnon on this robot but with some cool aluminum hubs. I turned them on the lathe and Tony broached them for a 1/2" drive shaft. |  |
 |
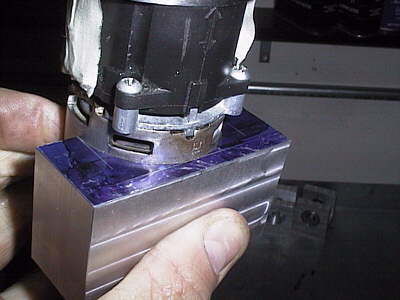
Tony supplied the drive motors which are extracted from Dewalt power drills. Since we lack the keen yellow and black plastic shell I had to machine up some alumimum mounting brackets. I use a coarse end mill to get the part dimensionally close (the stepped appearance) and then finish it off with the boring bar. |
 |
 |
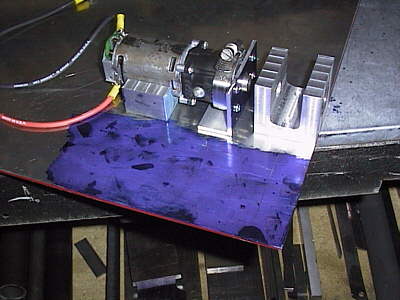
A perfect fit on the motor! The output of the planetary gearbox couples to a shaft supported by a custom bearing block to deal with the overhung wheel. Like most everything else the bearing block was machined out of a cube of 6061 aluminum. |
 |
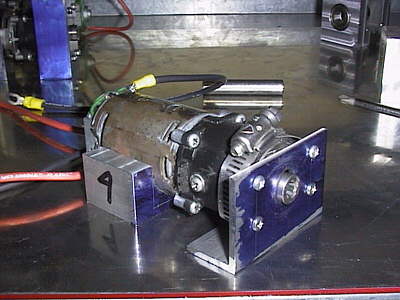 |
The mounted motor. The output spline required a clever part to be created that would be strong and not twist under the load of this high-impact robot (see below.) | |
 |
The base plate is sheared from a giant sheet of 7075 aluminum; very stiff. Holes for the bearing block and motor mounts were scribed and then drilled on the mill. | 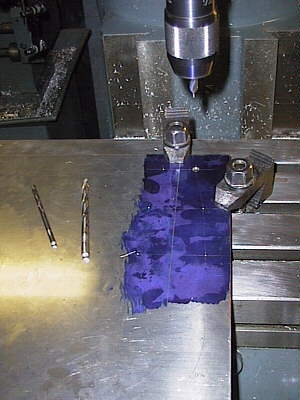 |
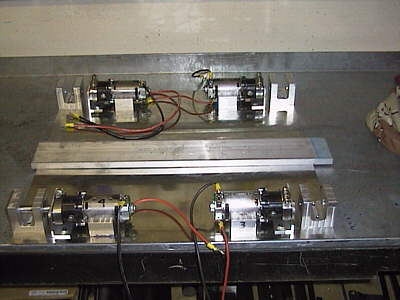 |
All four drive motors fastened to the base. The aluminum spar down the middle will stiffen the design as well as become the base plate for the spinning weapon module. | |
 |
The drive axles were machined from O-1 oil hardening steel, one end square to fit the gearbox and the other end keyed with snap rings to drive the wheel. I then sent them out to be heat treated to 48/52 Rc (pictures of the heat treating plant next month!) |  |
 |
The main weapon, a 68 lb. spinning blade, is mounted on a 1.50" chromoly shaft and driven by two 3L V-belts to a cast iron sheave. The whole thing is supported by two radial contact ball bearings. That part of the weapon doesn't store nearly as much energy as the blade but it needs to be rugged to absorb the shock of weapon usage. When the chromoly shaft is machined to size it will also be sent out for hardening. | 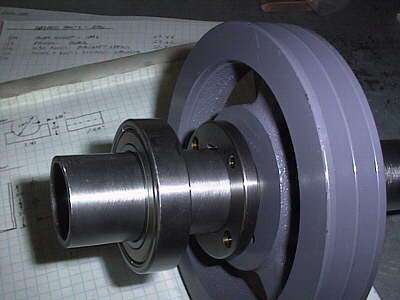 |